
前回は装置の仕様とI/O割付を整理しました。 今回は、実際にラダー図を書き始める最初のステップ、「手動回路」の設計について解説します。
「ボタンを押せば動く」という単純なプログラムに思えますが、実務では「どうすれば機械を壊さないか」という安全設計が最も重要になります。
1. ユニット構成の確認(KV STUDIO)
ラダーを書く前に、まずはユニット構成を確定させます。今回は以下の構成で設定しました。
- CPU: KV-X520
- 入力: KV-C32X(X000~)
- 出力: KV-C32T(Y020~)
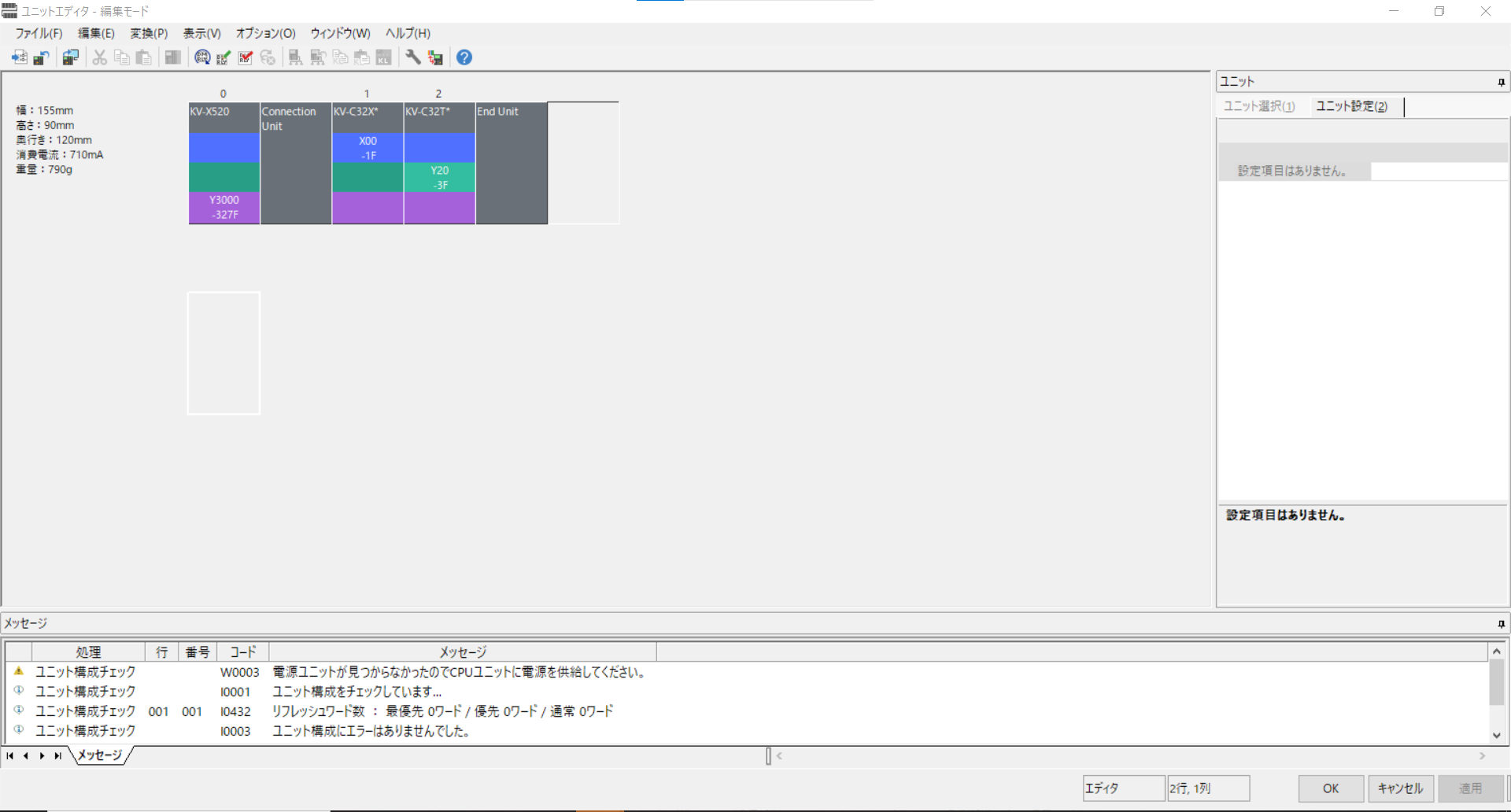
このようにユニットエディタでハードウェアを定義することで、PLCは初めて外の世界(センサや電磁弁)と繋がることができます。
2. 全ての動作の親「運転準備(MC)」回路
シリンダを動かす前に、まずは装置の動力を生かす「運転準備」回路を作ります。
自己保持回路の活用
今回は、操作盤にある「運転準備入(X01)」と「運転準備切(X02)」のボタンを使って、PLC内部で自己保持回路を組みます。
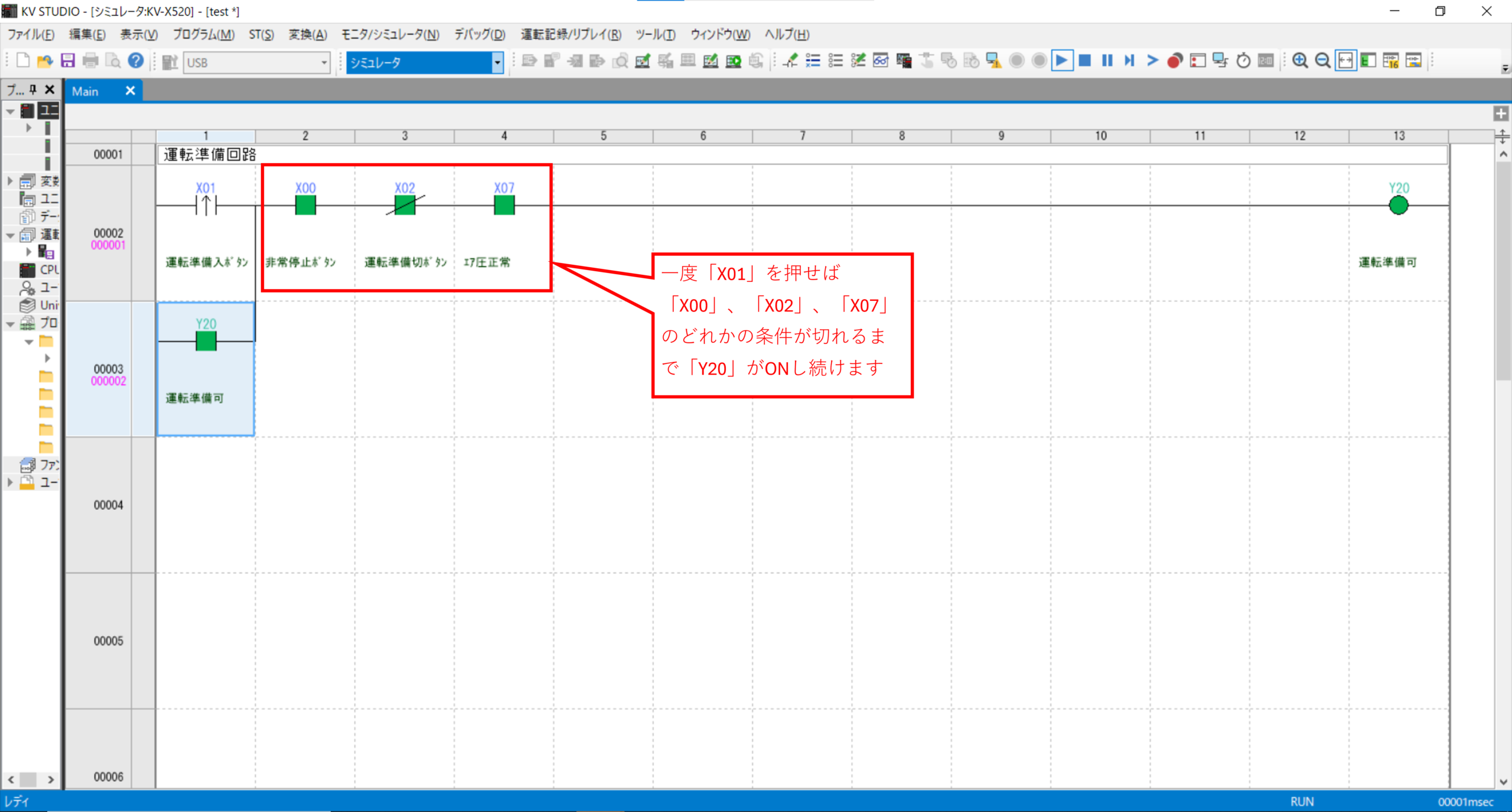
- ロジック: 「非常停止ボタン(X00)」と「エア圧OK(X07)」が揃っている状態で、「運転準備入(X01)」が押されたら、内部リレー(M0など)をONし、自分自身の接点でその状態をキープ(保持)します。「運転準備入(X01)」は押しっぱなしで動いてしまわないように「立ち上がり」で使用します。
- 解除条件: 「準備切(X02)」が押されるか、「エア圧OK(X07)」がOFFになるか、「非常停止」が叩かれた瞬間に、保持が外れて動力が遮断されるように組みます。
- アンサー:「運転準備可(Y20)」でちゃんと動力が入ったかどうかの返事が「MC_ON(X03)」のONで判断できます。
💡 補足:ハード保持と安全PLC
今回はPLCで保持する基本的な方法を解説していますが、大規模な設備や高い安全性が求められる現場では、「安全リレーユニット」や「安全PLC」を使用して、ハードウェア側で物理的に保持・遮断を管理する設計が主流です。その場合、PLCは「動かして良いか」の許可信号(Y)を出すだけの役割に変わるので、
ラダープログラム自体はもっとシンプルになります。
3. タッチパネル(TP)操作と内部デバイスの扱い
本装置では、手動操作はすべてタッチパネルから行います。
Bデバイス(補助リレー)への割付
物理的なスイッチ(X)とは異なり、タッチパネルのボタンはPLC内部の補助リレーを使用します。今回は「B」のデバイスを設定します。
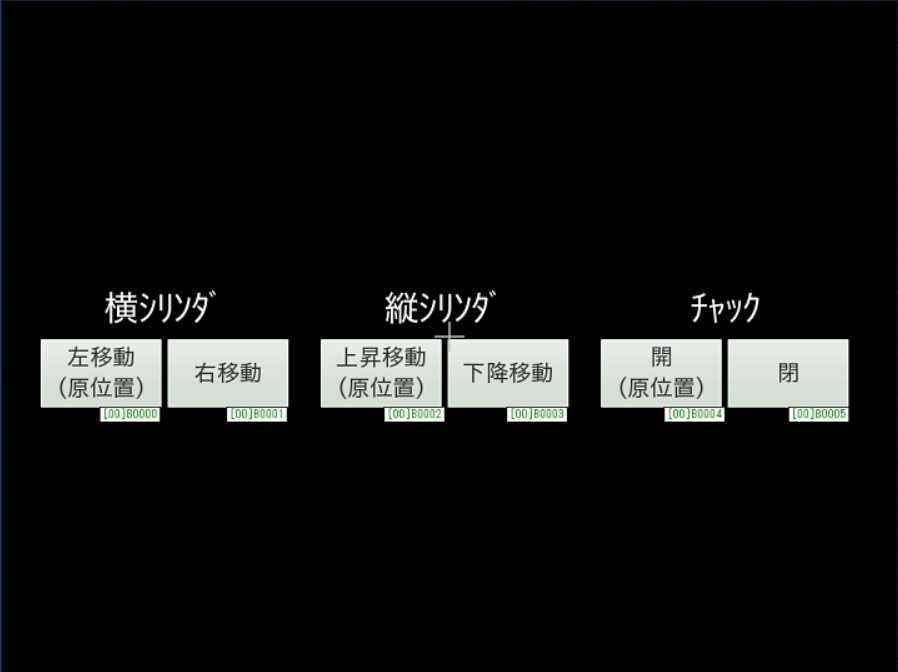
- B0000: 横シリンダ左移動(原位置)
- B0001: 横シリンダ右移動
- B0002: 縦シリンダ上昇移動(原位置)
- B0003: 縦シリンダ下降移動
- B0004: チャック開(原位置)
- B0005: チャック閉
機能ごとにアドレスを設定しました。
今回はボタンだけの単純な設計としました。
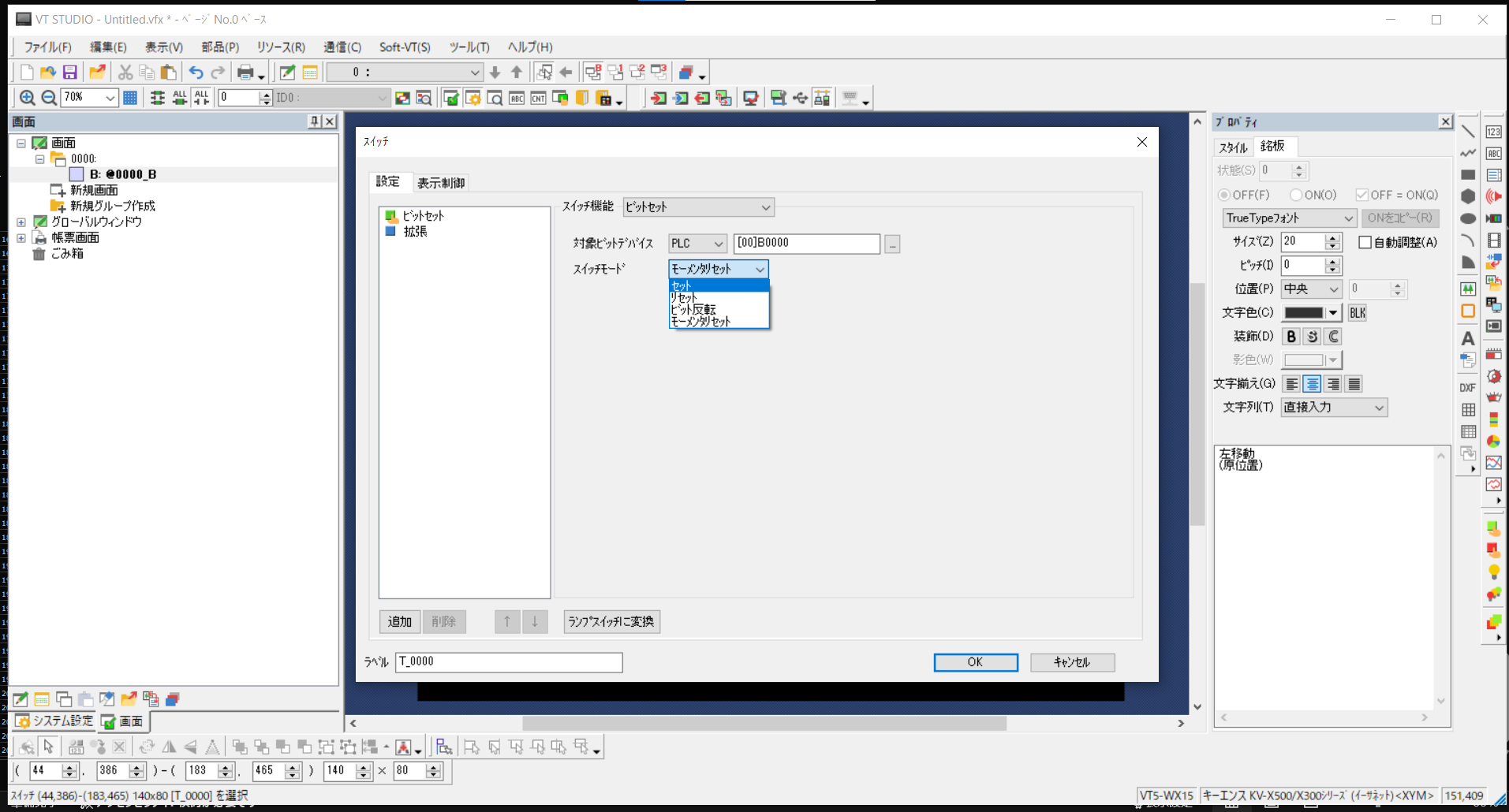
モーメンタリ動作
手動操作のボタンは、「押している間だけONする(モーメンタリ)」設定にします。ボタンを離しても動き続けるような設定にすると、現場での微調整や緊急時の停止ができなくなります。
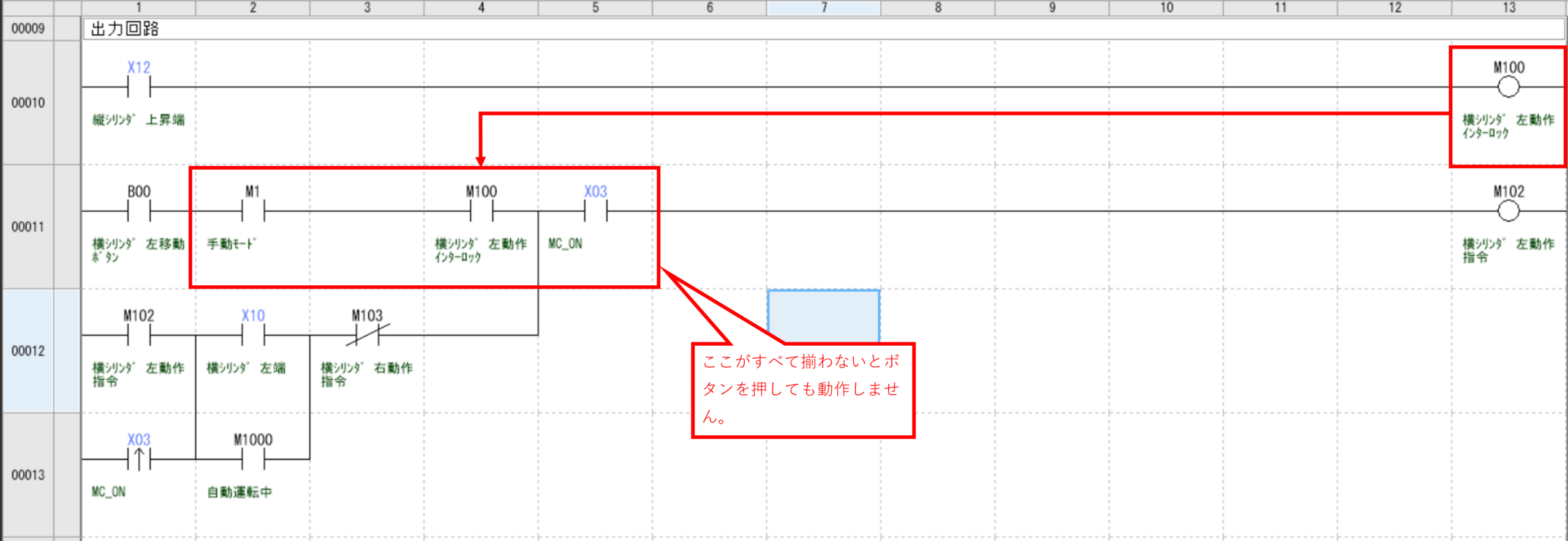
4. 機械を壊さない「手動出力回路」とインターロック
メインとなる出力回路です。手動出力回路は、以下のような「直列条件」の組み合わせで構成されます。
出力の論理構成: [TP操作指令] + [手動モード] + [★インターロック] + [運転準備OK] = 出力(Y)
手動、自動の判別
今回は「自動/手動切替スイッチ(X4)」がONなら自動モード、OFFなら手動モードとします。
そのままON/OFFで使うとわかりにくいので、
- M0:自動モード
- M1:手動モード
と内部リレー(M)を起こします。
今回は手動を動かすことを目的としているので、「M1」がONしていることが動作条件となります。

出力回路とインターロック(禁止条件)
ここからは、実際にシリンダを動かすための手動回路を組んでいきます。 例として、「横シリンダの左右移動」の回路を解説します。
インターロック(動かすための条件)がしっかりしていないと簡単に機械が壊れます。
安全な回路にするためには、以下の3つのステップを踏んで設計します。
今回はM100~を出力回路用の内部デバイスとして設定しました。
- M100:横シリンダ 左動作インターロック
- M101:横シリンダ 右動作インターロック
- M102:横シリンダ 左動作指令
- M103:横シリンダ 右動作指令
- M104:縦シリンダ 上昇動作インターロック
- M105:縦シリンダ 下降動作インターロック
- M106:縦シリンダ 上昇動作指令
- M107:縦シリンダ 下降動作指令
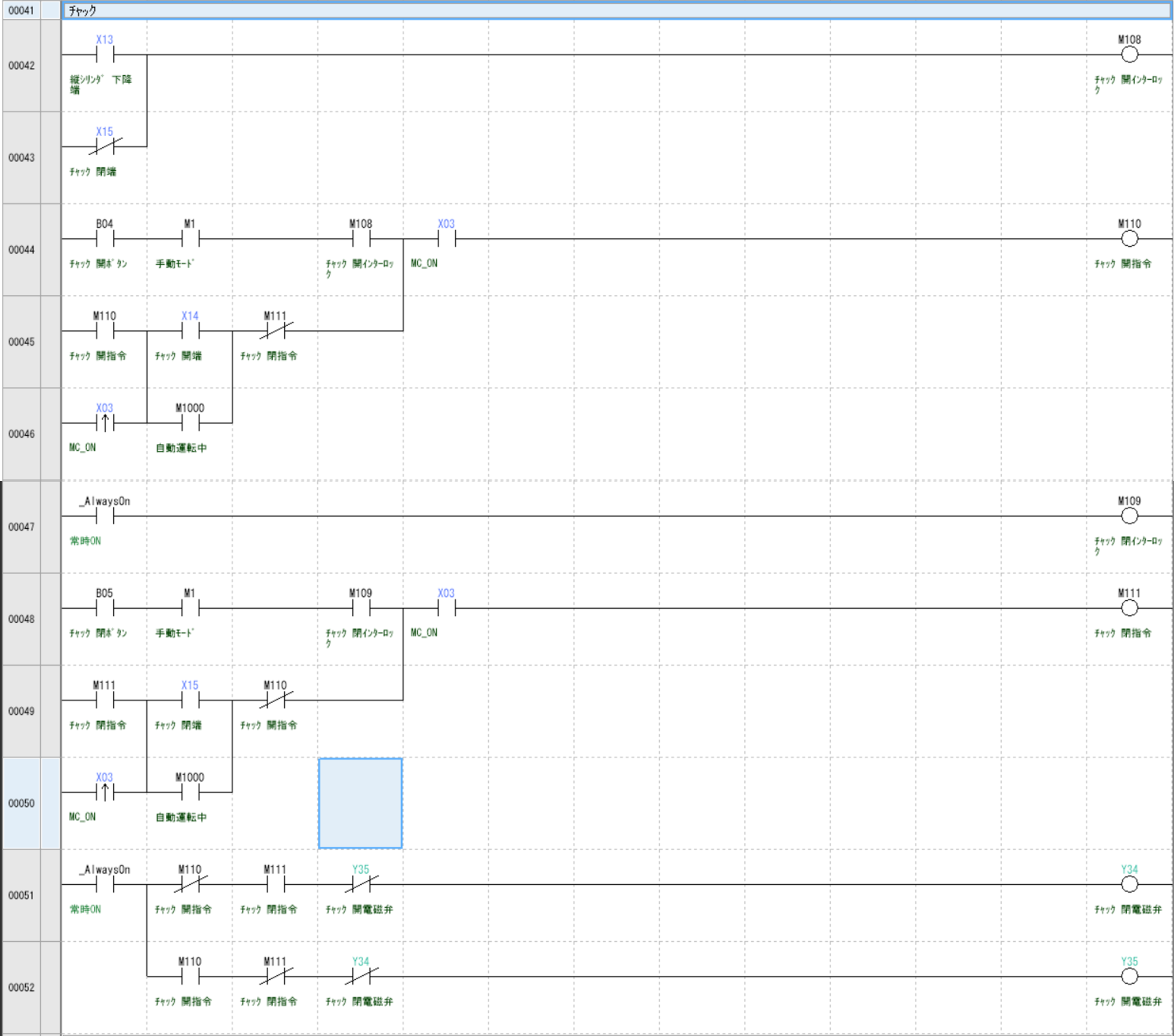
- M108:チャック 開インターロック
- M109:チャック 閉インターロック
- M110:チャック 開指令
- M111:チャック 閉指令
まずは横シリンダの出力回路の全体像をお見せします。
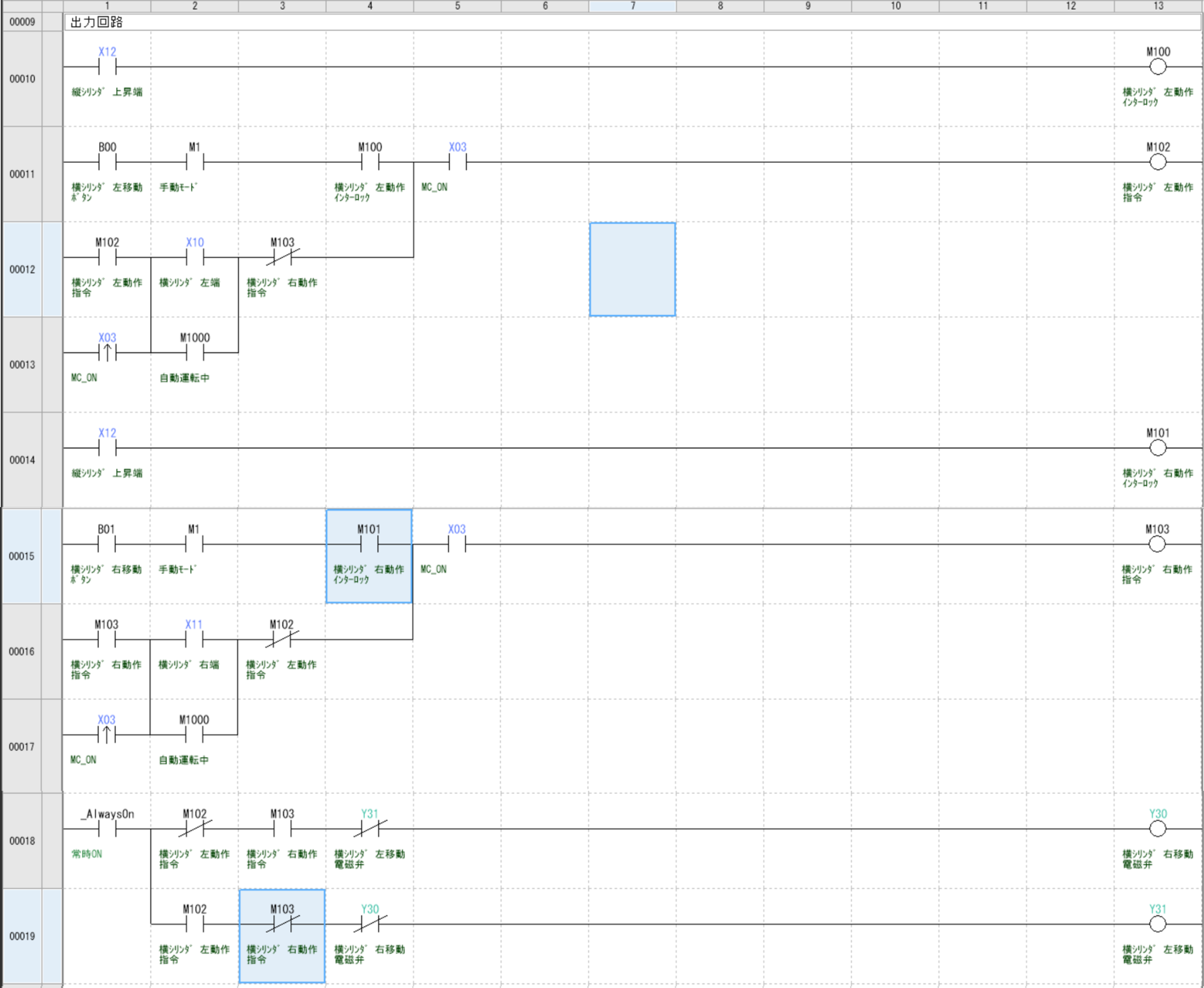
ステップ1:動作許可(インターロック)を作る
全体図の一番上、M100とM101の回路を見てください。ここで「シリンダを動かしても安全か」の許可証を作ります。 左移動(M102)を例にすると、以下の3つの条件が揃っていないと絶対に動かないようにしています。
- 動力の確認(X03 MC_ONのa接点): 「そもそも機械を動かす準備ができているか?」という大前提です。第1回の記事で解説した通り、プログラム上だけでなく、盤内の電磁接触器(MC)が物理的に確実に入っている(X03がON)ことを、すべての動作の親条件として先頭に入れています。
- 空間的な安全(X12 縦シリンダ上昇端のa接点): 縦シリンダが下がった状態(チャックが降りた状態)で横に動くと、ワークやメカが激突して大破します。そのため「縦シリンダが確実に一番上にいる時だけ」を必須の許可条件にします。
- モードの確実な切り分け(M1 手動モードであること): もし自動運転中に間違って手動ボタンを押してしまったら、自動プログラムと衝突して大事故に繋がります。「手動モードの時しか、手動操作を受け付けない」というシステム的な安全策です。
ステップ2:「端保持」と「バイパス回路」
次に、実際の「動作指令(M102 / M103)」を作ります。
現場のトラブルを未然に防ぐための工夫をしていきます。
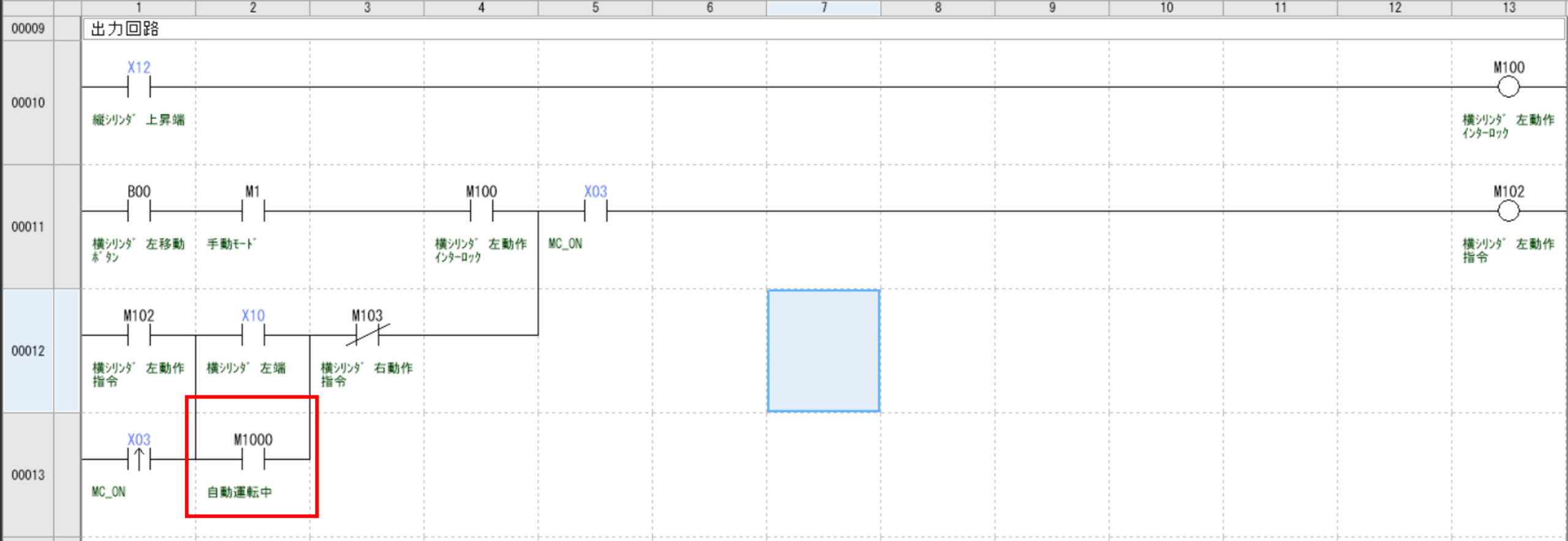
① エア抜けを防ぐ手動の「端保持」
シリンダが動き終わったら指令を切る、これだと端に着いた瞬間に電磁弁の出力が切れ、エアが抜けて保持力が無くなってしまいます。
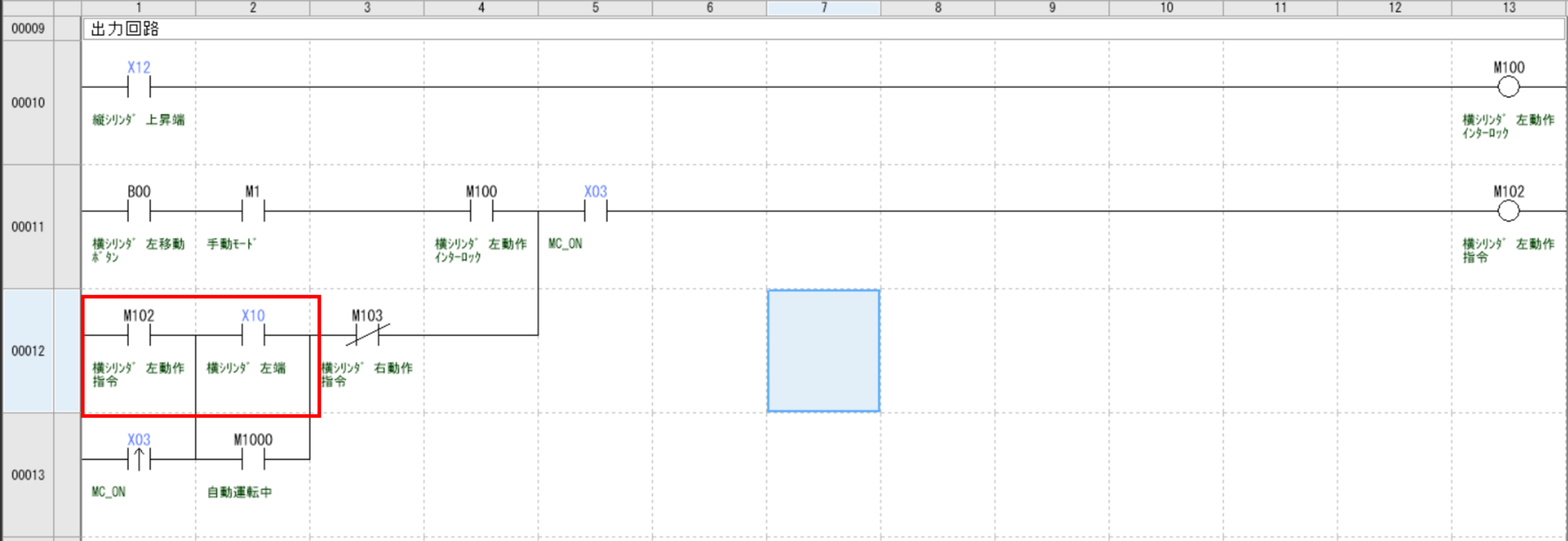
画像を見ると、手動指令(M102)に対する自己保持の条件として、右端センサ(X10)のa接点が組まれています。これが「端保持(たんほじ)」です。 手動ボタンを押してシリンダが右端まで到達するとこの回路がONになり、ボタンから指を離してもエア圧でしっかりと押し当てた状態をキープしてくれます。(移動途中で指を離せばその場で止まるため、デッドマン機能としても安全です)
② センサの瞬断から設備を守る「自動運転中(M1000)のバイパス」
さらに画像を見ると、この端センサ(X10)と並列に、「M1000(自動運転中)」のa接点が入っています。
自動運転については次回以降に解説予定ですがとりあえず自動で動いてるときにM1000がONするものとして捉えてください。
実際の装置では、シリンダが端にガツンと到達した衝撃(バウンド)で、センサが一瞬だけOFFになる「瞬断(チャタリング)」が頻繁に発生します。もしセンサの信号だけで保持をかけていると、この一瞬の振動のせいで保持が切れ、自動運転中にエアが抜けて設備が止まってしまう(チョコ停)原因になります。
なので、「自動運転中は端センサの信号に関わらず、M1000でバイパス(短絡)させて出力を強制的に維持する」という設計にしました。これにより、物理的な振動やノイズに強い、安定した機械になります。
③ 復旧時のリカバリーを果たす「MCアンサー立ち上がり(X03↑)」
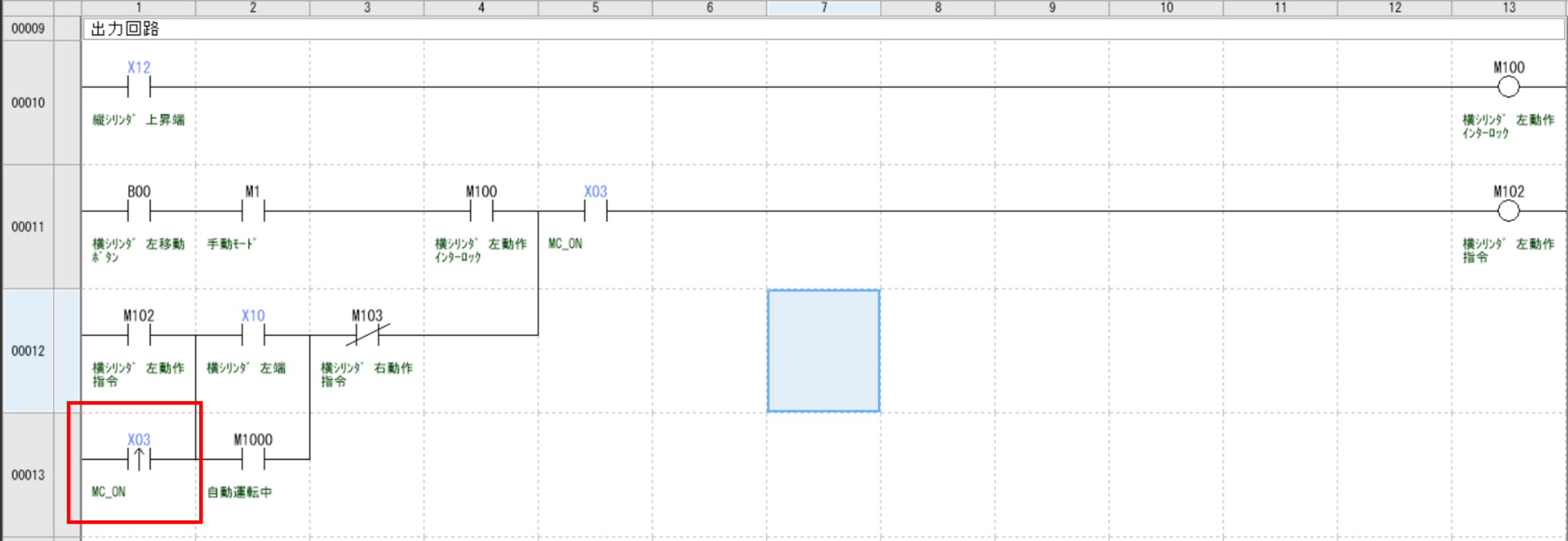
動作指令の回路内に「X03(MC_ON)の立ち上がり(↑)」が組み込まれています。
これは、非常停止などからの復旧時に、シリンダの保持を自動でやり直すためのフェールセーフ回路です。
もし装置稼働中に安全ドアが開けられたり非常停止が押されたりすると、盤内のMC(動力)が落ち、電磁弁のエアが抜けてしまいます。その後、安全を確認してMCを再投入(X03がON)した瞬間、この回路は以下のように働きます。
- MCが入った瞬間(X03↑)に、PLCはたった1スキャン(一瞬)だけ指令(M103等)にパルスを送ります。
- もしこの時、シリンダが既に右端(X11がON)にいれば、この一瞬のパルスが「①の端保持回路」を自動で再起動(ラッチ)させます。
これにより、MCが復旧した瞬間にエア圧が元通りに印加され、ワークを落としたりシリンダが位置ズレを起こすのを防いでくれます。
④ 逆方向の動きを即座にキャンセルする「対向インターロック(b接点)」
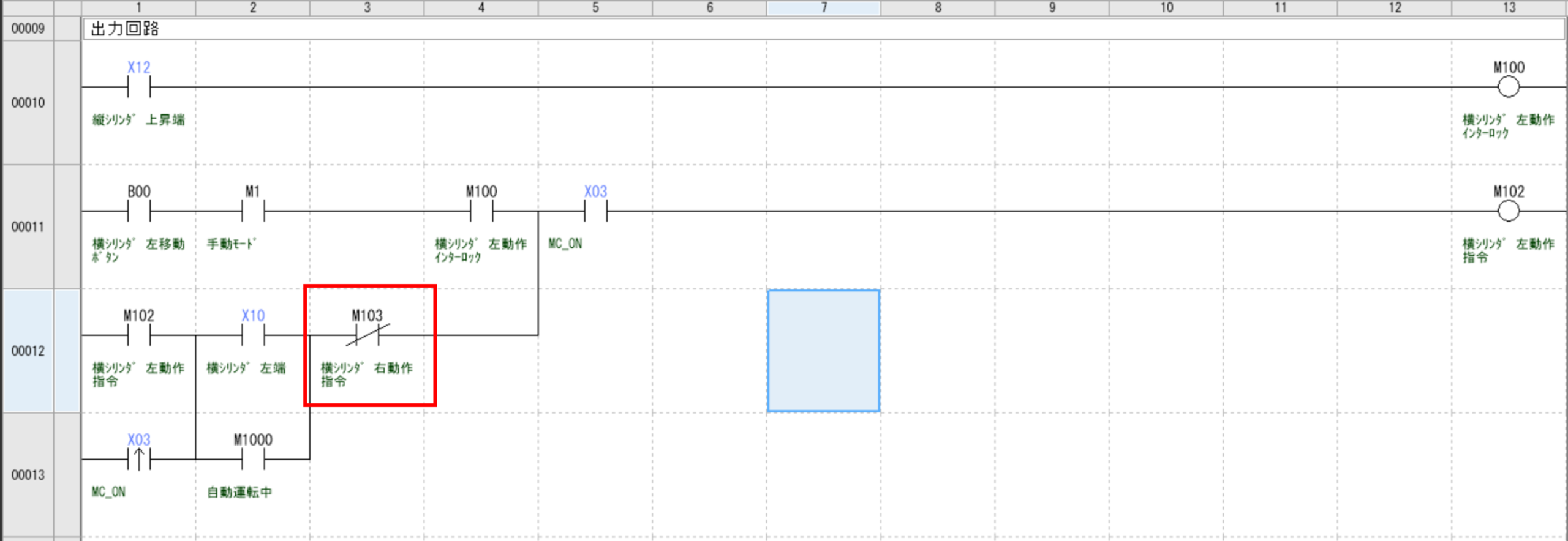
保持回路の中をよく見ると、左動作指令(M102)の保持ルートの中に「右動作指令(M103)のb接点」が入っています(右動作側にも左のb接点があります)。
これは単なる同時押し防止ではなく、「反対方向のボタンが押されたら、現在の保持を即座にキャンセルする」という設計です。 もしこのb接点がないと、内部の指令(M102とM103)が両方ともONのまま自己保持されてしまい、プログラムが致命的なバグを起こします。指令の段階でお互いのb接点を入れることで、内部回路の競合を完全に防いでいます。
ステップ3:最終出力と「二重インターロック」
最後に、内部の動作指令(M102 / M103)を、実際の物理出力(Y30 / Y31)に繋ぎます。 ここでもただ指令を繋ぐだけではなく、「二重インターロック」をかけています。

右移動電磁弁(Y30)を出力する直前に、左移動電磁弁(Y31)のb接点を入れています(左移動側にも右移動のb接点を入れます)。 プログラム内部の指令(M)の段階ですでに逆方向の動きを禁止していますが、最後の物理出力(Y)の直前でも、お互いのb接点を入れて絶対に同時ONしないようにしています。
万が一プログラムのバグで左右の指令が同時に出てしまったとしても、この最後の砦があるおかげで、電磁弁のコイル焼損や異常動作を確実に防ぐことができます。
その他のシリンダ
横シリンダの回路をベースに縦シリンダとチャックの出力回路も作っていきます。
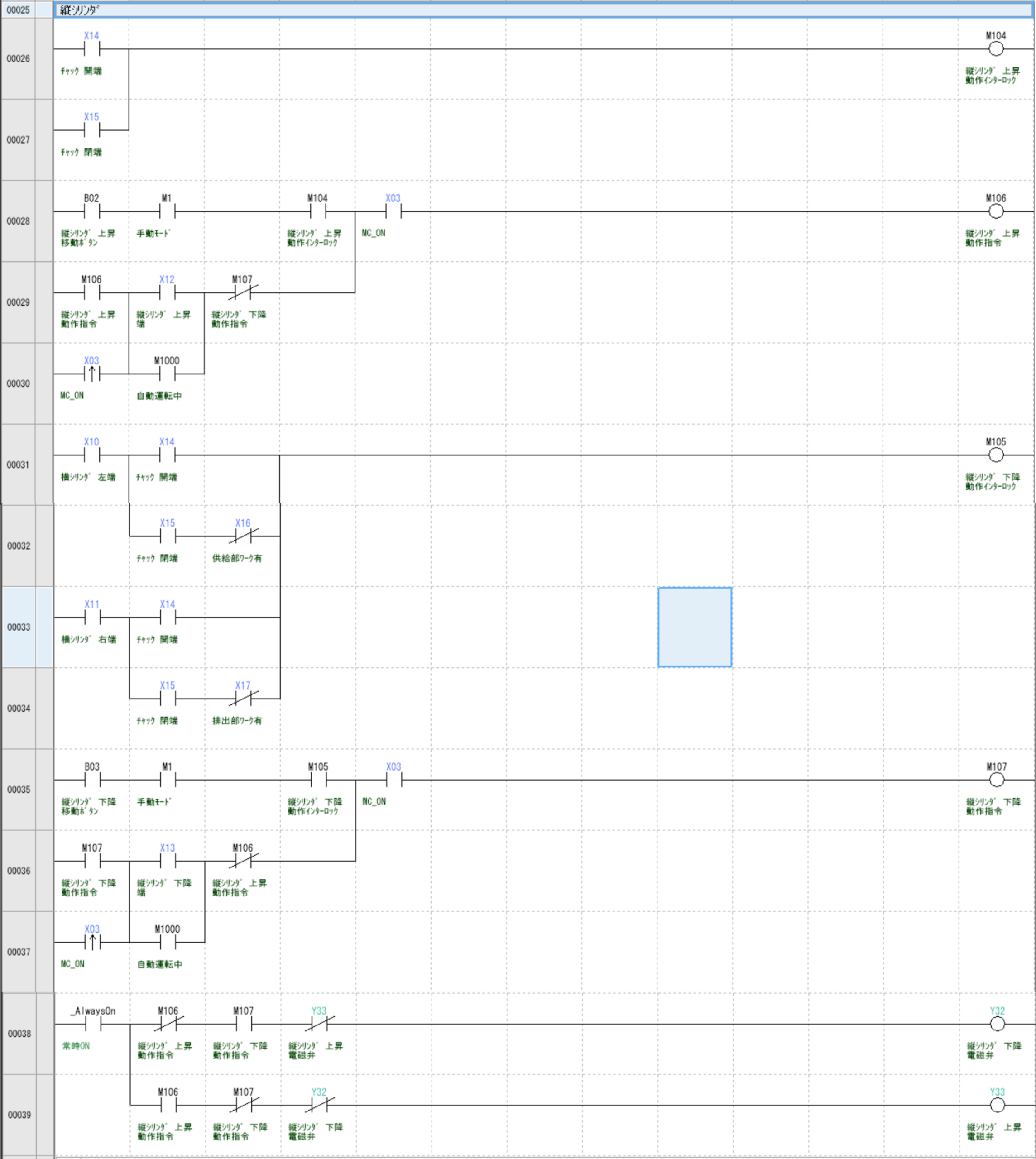
縦シリンダ
上昇
- チャックが「開端(X14)」または「閉端(X15)」にいること
- 「上に逃げるだけならぶつからないし無条件でいいのでは?」と考えがちですが、チャックが中途半端に動いている最中に上昇を開始すると、ワークの保持が不安定になったり、予期せぬ挙動を招く恐れがあります。
下降
- 横シリンダが所定の位置(左端や右端)にいることに加え、「チャックの状態と下降先の状態」を確認するインターロックが必要です。
- 例えば、チャックがすでにワークを掴んでいる状態で下降する場合、置く場所に「別のワークが無いこと」を確認しなければ、ワーク同士が激突してメカを破損してしまいます。
チャック
開
- 「下降端(X13)」 または 「チャック閉ではない(X15のB接点)」
- 空中で誤って開操作をした際の「ワーク落下事故」は絶対に防がなければなりません。しかし、一律に禁止すると、非常停止などで中間位置に止まった際、原点(開)に戻せず「詰む」ことになります。 そこで、*ワークを保持していない(閉端OFF)なら、どこで開いても安全」という論理を加えます。これにより、安全を担保しつつ、トラブル復旧時に手動でセンサーを隠すような「禁じ手」を使わずに済む設計にしています。
閉
- いつでも操作可能(常時ON接点)
- 空中でチャックを閉じても物理的な破損リスクが低いため、ここは操作性を優先します。 「下降中に閉じたら危ないのでは?」という懸念に対しては、シリンダ側の下降インターロックで「チャックの状態とワークの有無」を二重に監視しているため、この階層ではあえてフリーにしています。
💡 ワンポイント:現場に合わせた「さじ加減」
今回は「ワークなしなら空中で開ける」設計にしましたが、客先のルールや設備の構造によっては「下降端以外は動かせない」とするときもあります。
その場合は、さらに「メンテナンスモード中のみ許可」といったバイパス回路を組み合わせるなど、現場の要求に合わせて「安全」と「復旧性」のバランスを考えます。
まとめ
今回は、シリンダを安全に動かすための手動回路について解説しました。
単に「ボタンを押せば指定の方向に動く」というだけの回路を作るのは、とても簡単です。 しかし、実際の現場では、作業者の予期せぬ誤操作、シリンダのバウンドによるセンサの瞬断、非常停止による不意のエア抜けなど、机上では想定しきれないあらゆるイレギュラーが発生します。
今回解説した「インターロック」「チャタリングに強い端保持とバイパス」「MC復旧時の自動リカバリー」といったプログラムは現場のトラブルから、機械と作業者を守るための設計です。
無茶な操作をしても、機械が壊れない。
強固な土台(インターロック)が完成していれば、安心して自動運転のプログラムを組むことができます。
仮にミスをしていて、自動運転でおかしな動きをしようとしてもインターロックで動けないので壊れる前に止めることができます。
次回は、装置を自動運転で動かすための準備となる、「原点復帰と初期状態」の回路設計を解説していきます。
コメント